

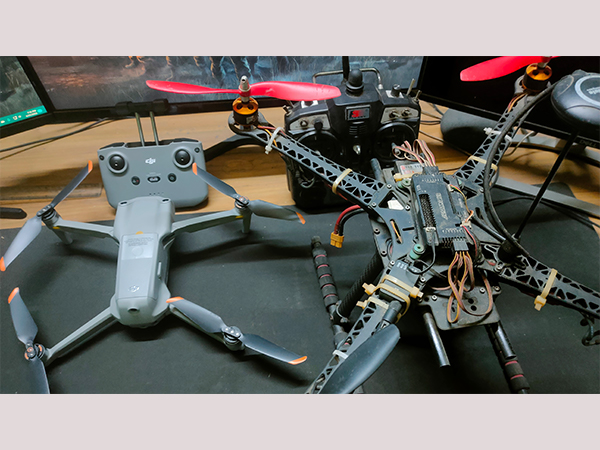
LaZy BiRd is a custom-built quadrotor drone project that soars with precision and autonomy. Powered by the popular APM Flight Controller, LaZy BiRd is designed for both exploration and experimentation in the field of unmanned aerial systems. With GPS integration and support for autonomous flight plans, it offers professional-grade features like Return-to-Home, Altitude Hold, and waypoint-based navigation—making it perfect for both research and hobbyist use.
The drone showcases not only expert mechanical assembly but also thoughtful tuning of flight parameters for optimal performance in various weather and payload conditions. Built to be stable, lightweight, and reliable, it opens doors to applications like field mapping, delivery systems, aerial photography, and surveillance.
Key Features:
LaZy BiRd features autonomous GPS waypoint navigation, pre-programmed flight missions, real-time telemetry, and stabilizing flight modes, including altitude hold and loiter. It also integrates Return-to-Launch (RTL) and failsafe features to ensure safe and secure operations. The drone is equipped with a modular architecture, allowing for easy upgrades, and is supported by robust ground station software for complete control.
| Feature | Description |
|---|---|
| Flight Controller | APM 2.6 with Mission Planner Support |
| GPS Module | Ublox M8N with Compass |
| Frame | Carbon Fiber 550mm Frame |
| Motors | Brushless 950KV with ESCs |
| Battery | 4S 14.8V 1550mAh 100C LiPo |
| Telemetry | 433MHz Ground Station Link |
| Software | Mission Planner / QGroundControl |
Swipe Right To Surf the Technologies



